
How to Read Fish Finder Data: Readings Interpretation for Beginners
How to Read Fish Finder Data: Readings Interpretation for Beginners
In this article topRik experts explain in detail what data you can get on the screens of various sonar models, and most importantly, how to understand this image, how the correct interpretation of the readings can increase your catch.
Yes, there are avid fishermen among us too. Therefore, we have tested in practice many types of echo sounders for fishing in different conditions: in fresh and sea waters, summer and winter, fishing from board and shore, etc. Just imagine - for each option you can choose an echo sounder model that will most accurately inform you about the bottom topography, the state of the underwater space and about the fish presence. We hope that this comprehensive guide will be useful not only to those who choose their first echo sounder for fishing, but also to experienced fishermen who plan to learn new fishing methods and expand their arsenal of gadgets.

Fish Finder Basics
An echo sounder is a measuring device for determining the depth under a vessel, studying the topography, bottom structure and detecting fish.
Basic Components of an Echo Sounder
A fishing echo sounder consists of three parts:
- Transducer is a sensor-emitter that is located below the waterline on the bottom or transom of the vessel and is directed towards the bottom. Its task is to send signals down and receive them after reflection from the bottom or other objects falling into the cone that the sensor beams form in the underwater space.
- Processor – interprets the received data from the sensor and displays it in graphical form.
- Monitor – visually displays the state of the underwater space under study, including in real time. Shows the bottom topography, depths, objects in the studied space, including schools of fish and individual individuals. Can display water temperature, depending on the functions of the transducer.
Operating Principle of an Echo Sounder
The electrical impulse from the transmitter is converted by the transducer into a sound wave and sent into the water. If this wave hits an object, it is reflected. The echo enters a transducer, which converts it back into an electrical signal, amplified by the receiver and sent to the screen.
Since the speed of sound in water is constant (about 1.575 km/sec), by measuring the time interval between the transmission of the signal and the receipt of the echo, the distance to the object can be calculated. This process is repeated many times per second.
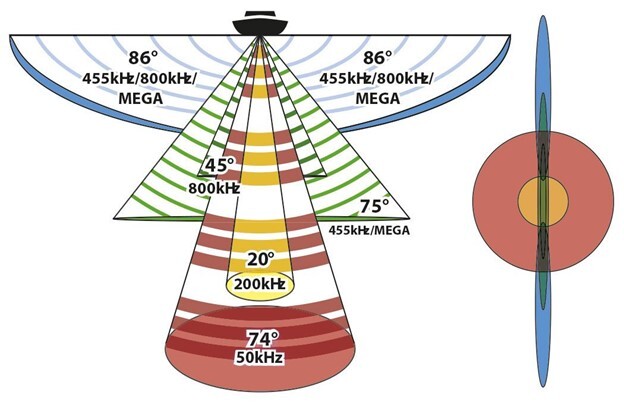
In water, a sound wave is most easily described as a cone that has a certain angle. The higher the frequency, the narrower the “beam”.
The pulses sent by the echo sounder can be of different frequencies - 60 Hz, 83 Hz, 200 Hz, etc. The frequency most often used in echo sounders is 192-200 kHz, but some models use a frequency of 50 kHz.
Although these frequencies are within the sound spectrum, neither humans nor fish can sense them (so don't worry about your fish finder spooking your fish - they simply won't hear it).
As stated above, the echo sounder sends and receives signals, then “reflects” the echo on the screen. Because this happens many times per second, the echo appears on the screen as a continuous line representing the signal coming from the bottom. In addition to it, the screen displays echoes from all objects encountered along the way between the surface of the water and the bottom. Knowing the speed of sound in water and the time required to receive the echo, the device can calculate the depth of the water and determine the presence of fish in it.
On the way to the bottom and back, the impulse collected various information: the number, size and density of objects in the water column and, finally, the structure of the bottom itself. The processor goes through the information it collects and displays it on the display in the form of a moving graphic image.
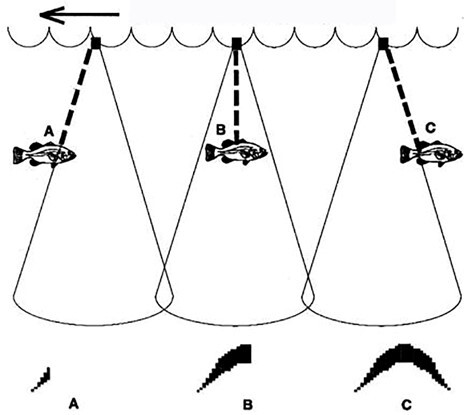
And here one very important point should be taken into account: regardless of the speed of your boat - from a complete stop to maximum speed - the echo sounder screen will scroll the image at the same programmed speed. Moreover, if there is a fish or tackle under the boat in the cone of the beam, then a long strip will appear on the screen, and a novice user will get the impression that it is something huge. In fact, the impulse bounces off the same object repeatedly, and the screen is forced to show it constantly.
Now suppose that we walk through the same subject at a speed of 5 km/h. The impulse will be reflected from our object (fish, driftwood, grass, net) only a few dozen times. And, most likely, a so-called arc or spot of a certain size will appear on the screen. If we pass over the same object at a speed of 20-50 km/h, then the beam will only have time to hit the object a couple of times - it will be depicted as a very small and short arch. Or maybe it won’t have time to be displayed at all if the object is small and the speed is high. Moreover, in all three cases, the image on the screen will scroll at the same speed.
If your fish finder's transducer does not include CHIRP scanning technology, you will have to adjust for speed using the screen scroll speed setting. It can be adjusted so that the subjective sensation of the boat moving over the bottom coincides with the screen scrolling speed.
CHIRP scanning technology, as well as more innovative technologies discussed below, allow the fish finder to display a detailed view of objects and bottom topography at speed.
The principle of operation based on the propagation of sound waves is the same for echo sounders intended for both amateur and professional fishing.
Types of Echo Sounders and Their Data Display
Years ago, when sport fishing fish finders were first introduced, a significant portion of fishing vessels were small boats with outboard motors. Moreover, even then, most echo sounders were portable, and it was easy to move them from boat to boat. This advantage was considered more important than the sonar's ability to operate at high speed.
But as boats improved and yacht models expanded, including those specially designed for fishing, more and more fishermen wanted to have a stationary echo sounder on board that could operate correctly at the speeds that their vessel could reach. In this regard, work began on creating a converter that functions normally regardless of the speed of the vessel.
There are several major scanning technologies used in fish finders today. An echo sounder can have one or more technologies, which significantly improves the quality of display of sonar information. Different technologies are used for different tasks, but in any case, the more scanning technologies, the more possibilities. Below we will look at the main scanning technologies currently used in fish finders.
Traditional Echo Sounders
Single- and double-beam models belong to the traditional class of echo sounders. The simplest ones are single-beam echo sounders. When choosing such an echo sounder, you should decide on the goals and tasks that the device will perform. If accurate and detailed information about the structure of the bottom is important to you, then you should pay attention to echo sounders with a narrow and high-frequency beam. If the purpose of the echo sounder is to detect fish under the boat, then it is better to give preference to devices with a wider beam and low frequency.
Much more convenient, but also more expensive, are double-beam echo sounders. The sensor of such an echo sounder emits two cone beams, for example, 20° and 60° at a frequency of 200 kHz and 83 kHz, which are one in one.
A narrow beam at a higher frequency allows you to obtain maximum detail and accuracy in determining the bottom topography. The wide beam is responsible for maximum target acquisition. The general idea is that the body of water is first scanned with a wide beam. But as soon as the target is found (a fish or an interesting drop in the structure of the bottom), you should switch to a detailed inspection of the place with a narrow beam with high detail. In echo sounders that have a multi-screen viewing mode, you can simultaneously see data from two frequencies, which greatly facilitates the search for fishing spots.

If a fish swims under the bottom of a stationary vessel, a pattern in the form of a small arc (or a fish symbol) will appear on the screen of a bottom- or double-beam echo sounder. A similar result will occur in the case when the ship is moving and the fish is motionless. In fact, it is almost impossible to see the ideal arch on the screen, since not only the ship is moving, but the fish is not standing still, but moving, and it does not necessarily pass under the bottom of the ship.
So, the bigger the arch, the bigger the fish? No, not always. A fish of the same size crossing the central region of the cone of radiation near the surface of the water will only be in this cone for a short time, and therefore will appear on the screen as a small arch (arc or symbol). The same fish near the bottom, passing through the middle part of the cone of radiation, will be visible longer in this cone, as a result of which it will be depicted on the echo sounder screen as a large arch (arc).
That is, the closer the fish is to the vessel, the smaller it will be on the screen, and the more we see it on the screen, the further it is from the vessel. This is completely the opposite of what it would be like if we observed this fish with our own eyes.
But this is only the most general description. In fact, the arcs on the screen can be of different sizes for a thousand other reasons: the fish rises or sinks, crosses the extreme region of the radiation cone at an acute angle to the direction of the ship, the ship moves faster or slower. The fish may generally be so close to the bottom that it will fall into the “dead zone” and will not be visible at all.
You may find that a school of small fish, packed together quite closely, will appear on the screen as a very large arc (arch), but the edges of such an arch will be much less dense than if this arch were a reflection of the sound from a single, but large fish. Arches can be very different, but any of them is formed only by real fish.
It should be taken into account that the described models do not display the true spatial position of the fish relative to the vessel, but the projection of the fish image onto a vertical plane passing through the central axis of the radiation cone. This creates the illusion that all underwater objects detected by the beam are located under the bottom of the vessel, although in fact this is not the case.
Down Imaging technology allows you to get a detailed picture directly under the boat. To create high-resolution images, the frequencies most often used are 800 kHz (45°) and 455 kHz (75°). The frequencies used allow you to scan underwater space from 30 to 100 meters in depth, depending on the power of the echo sounder. When using more powerful additional units, you can achieve a scanning depth of even over 200 meters. The 800 kHz beam is used for maximum detail, while the 455 kHz beam provides better quality at greater depths and in more contaminated water.
And one more problem with single- and double-beam models - they correctly display the state of the underwater space in the beam area only at a certain speed of the boat to which the transducer is attached. Of course, this does not apply to wireless models that are thrown into the water using a spinning rod.
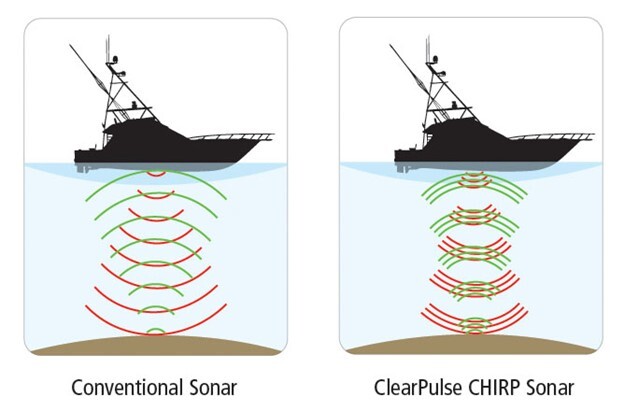
CHIRP Echo Sounders
CHIRP stands for as Compressed High-Intensity Radiated Pulse. A fish finder without CHIRP emits short pulses at a single frequency. The CHIRP sounder emits a longer signal over a range of frequencies (frequency modulated signal).
How does the fisherman benefit from this? The device processes the reflected signal at several frequencies at once and extracts more information from it. At the same time, noise reduction improves, sensitivity increases and it becomes possible to distinguish between individual fish standing nearby (target separation improves). Therefore, it is not surprising that currently almost all manufacturers of echo sounders use CHIRP technology, both in classic sonars and in models with 3D, bottom and side scanning.
Echo Sounders with 3D and Side Scanning
The first echo sounder with side-scan support appeared in 2010. Side scanning technology is designated differently by different manufacturers: Side Imaging, StructureScan, SideVü, SideVision. The side scanning system in these models is complemented by a built-in GPS navigator.
The Side View feature gives anglers excellent, clear views and topography of areas on each side of the boat. This helps detect objects and fish hidden from the 2D sensor, located among submerged trees, behind rock slides, and even under floating objects such as docks or barges.
When scanning fish suspended in the water column, a shadow effect occurs: living creatures are visible. One way to check the cover for the presence of fish is to stop the picture and zoom in as far as the device allows. Large fish appear as separate, elongated, pale objects. Schools of forage fish can be recognized unmistakably.
Fish that are firmly pressed to a hard bottom will blend into the background and be difficult to notice, but fish that are located on a soft bottom will stand out in brighter tones. The bait will look like cotton balls.
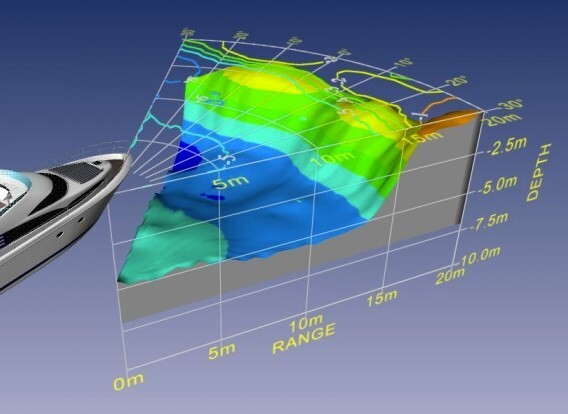
In 2015, Garmin introduced a new generation of 3D echo sounder, which allows you to scan the water space, both forward looking and under the boat. Six-beam scanning technology made it possible to display the three-dimensional topography of the bottom.
Against the background of the three-dimensional display of the bottom, the fish symbols seemed to hover, which made it possible to perfectly determine the location of the fish relative to the bottom. Color display provides incredible detail of the bottom topography. The forward-looking sensor makes swimming in unfamiliar waters much easier. The number of rays in modern 3D models already reaches hundreds. Following Garmin, 3D fish finders appeared in the Lowrance and Simrad lines. The use of 3D technology, along with other scanning technologies, provides a huge advantage in locating fishing spots.
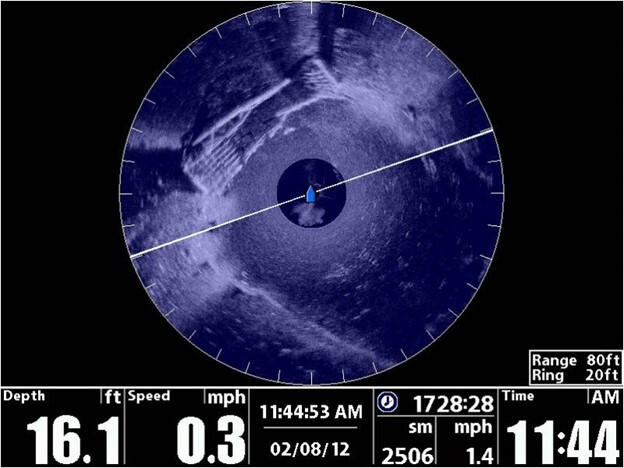
Let’s not forget 360 Imaging technology - it allows you to make a full all-round view of the underwater world of a limited radius and from a boat at anchor. 360-degree scanning technology is based on Side Imaging. A high-precision GPS sensor with a compass integrated into the system allows you to obtain the orientation of the boat relative to targets. True, the speed of the boat will still have to be controlled - the echo sounder reflects correct data at speeds of up to 13 km/h. But an echo sounder with 360 Imaging technology can be used as a forward-looking one with a scanning angle from 10 to 360 degrees. This opens up unique opportunities for fishermen and explorers.
Basic Display Elements of an Echo Sounder
Almost all echo sounders produced today allow you to determine the current depth, display the bottom topography on the screen, show the presence and depth of fish, and roughly estimate its size.
The echo sounder records the distance at which the obstacle is located and the strength of the reflected signal. A column with a depth scale is formed on the right edge of the echo sounder screen and a stroke is drawn at a fixed distance.
The color of the bar corresponds to the strength of the received signal. During the subsequent measurement, this column is shifted without change on the screen one position to the left, and the result of the new measurement is placed in the vacated rightmost column.
And so on: when a new measurement arrives, all previously received ones are shifted one column to the left, and the last measurement is always on the right edge of the screen. Thus, the image constantly moves from right to left.
New information arrives on the right; as it becomes outdated, it moves to the left edge of the screen and disappears.
Depth
If the object is large enough and many probes break on it, then the image of this object on the echo sounder screen is presented in the form of a stripe.
This is explained by the fact that the distances from the transmitter to various elements of the object are different and the corresponding strokes fill a whole range of depths from the distance to the nearest element to the distance to the most distant element.
The bottom surface, for example, at shallow and medium depths, appears as a wide strip. The upper boundary of this strip corresponds to the nearest point of the bottom structure. The distance to this point is considered the depth. Lower boundary of the strip is the distance to the most distant part of the bottom structure located in the beam.
At any distance between these boundaries there will definitely be an element of the bottom structure that will add its own touch to the image of the bottom; as a result, the entire range is painted over and a stripe is obtained. This strip is usually called a dead zone, since the fish located in it are not displayed on the screen of single- and double-beam echo sounders.
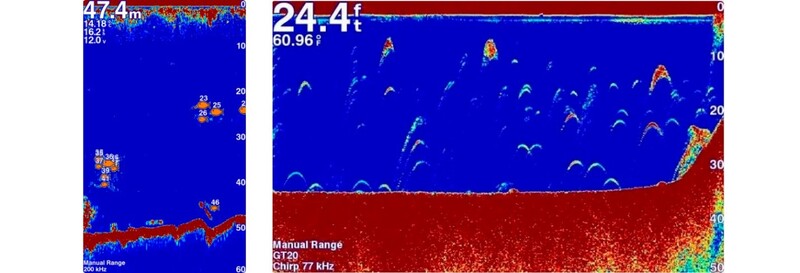
Fish Symbols and Arches
The fish can be located anywhere in the water. It will appear on the screen as arches or, if Fish ID is enabled, as icons. This makes it easy to identify fish and their school.
CHIRP technology, that is, a combination of different frequencies to collect more complete and detailed data, makes it possible to accurately determine not only schools of fish, but also individual specimen.
On the display, individual fish are shown as arcs or arcs. The latter can be very diverse in size, length and shape. Sometimes they look more like half-arcs, even short lines (this happens if the fish is not moving in a cone), so it takes some practice in identifying all these different types of arches as fish.
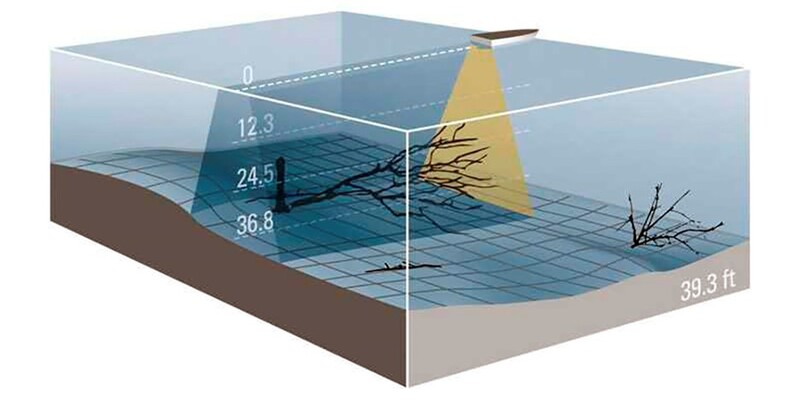
Bottom Structure
Fish finders are also great for scanning underwater terrain and topography, which can be used to find promising fishing spots. If you have a proper understanding of the bottom structure, you can easily find fishing areas.
The best way to do this is to look underwater for very large objects, such as large boulders or sunken trees, which often attract fish. On the display they are shown as dark protruding areas in the bottom area, around which there are many arcs.
Most experienced anglers try to look for vegetation underwater, because in such areas there can be a lot of fish, especially perch. When you encounter an area filled with algae, many vertical lines will appear on the fish finder display.
It is also known that many fish, for example, carp, like to gather in depressions with a characteristic V shape. They are easy to notice by the characteristic shape of the notch on the relatively flat surface of the bottom of the reservoir.
In addition, you should also look for transitional areas where fish often rest. An example of this would be a sudden change from shallow water to deeper water.
Below we will tell you how to interpret the types of bottom (soft, hard, vegetation) by the width and color of the lines.
Water Temperature
Although some fish are less susceptible to temperature changes than others, each breed has a specific temperature range that it tries to stay within.
The layer between the cold and warm layers of water is called a thermocline. Knowledge of the features of this phenomenon for successful fishing is no less important than atmospheric pressure or the strength and direction of the wind.
The difference between temperatures at the lower and upper boundaries of the thermocline can reach 10°C. The temperature jump zone is formed in conditions of stagnant water under the influence of factors such as solar heating, change of time of day and wind.
The temperature difference is so strong that the fish cannot overcome the thermocline without consequences for their physical condition. A temperature of 10-15 degrees prevents its free rise to the upper layers. Therefore, when a fish tries to pass through the water layer of a thermal jump , it experiences a state identical to shock. On a good quality echo sounder, the thermocline and the fish located in the comfort zone above or below it are clearly visible.
The thermocline is clearly visible using an echo sounder with a temperature sensor. Its boundaries appear blurry as the water continues to stir. If the reservoir is full of fishing and pleasure boats, active mixing of water is observed, and the thermocline boundary decreases.
If you know the characteristics of the thermocline, the fishing calendar and understand the behavior of different species of fish, you can successfully fish even with such an anomaly.
Interpretation of Echo Sounder Data
There are a number of features of interpreting data and images on the echo sounder screen, which at first present some difficulty for a beginner. We recommend simply making a few passes on the boat with the new echo sounder, without delving deeply into the theory at first and without changing the factory settings. Mark various images along the way, study changes in the color and saturation of the bottom lines, and we will tell you how to interpret this data.
Fish Symbols vs. Arches
The fish identification mode, which is trying to distinguish between images of fish and “non-fish”, is still far from perfect. After all, when you change the setting, the fish symbol can even represent other objects in the water, for example, garbage or branches.
This mode can be useful only for novice users of echo sounders, for whom the images of fish symbols are clearer than some strange arcs and stripes.
But after gaining even a little experience, you will agree that these arcs and stripes carry significantly more accurate and complete information necessary for detecting fish near the bottom, in the folds of the bottom, hiding in snags and among vegetation.
This mode, however, is very effective and intuitive when searching for large schools of fish and should not be completely neglected.
It should be remembered that sometimes Fish ID is wrong, so experienced fishermen prefer to identify fish manually based on arcs.
Fish Sizing
Many anglers mistakenly believe that a longer arc means a bigger fish, but this is not the case. Arch length does not correlate with size. It simply indicates that a particular fish has been swimming through the sonar for a long time. You need to look at the thickness of the arc to judge the size of the prey. Large fish reflect a stronger sonar signal than small fish.
The most important thing to keep in mind is that half an arc does not necessarily mean a small fish. There is still a high chance that this could be a large prey, just swimming under partially scanned area.
Thickness and Color of Bottom Lines
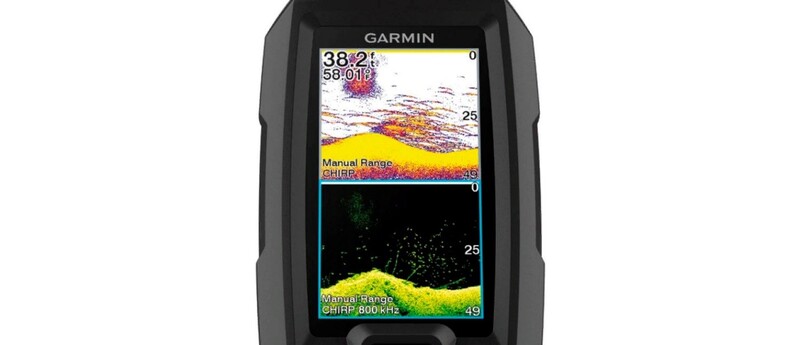
To understand what the bottom of a reservoir consists of, you need to look at its color, line thickness and the presence/absence of a repeated signal return. The intensity of signal reflection from a hard bottom will differ from a soft muddy bottom. Modern sonars from many manufacturers have a color display and use colors to show this difference.
Garmin model Striker Plus 4 displays a dark bottom if the echoes returned by the sensor are strong. This indicates dense and hard rocks without much silt content. If the color of the bottom is yellow, then there is a lot of silt and mud.
That is, you should carefully study the operating instructions for your new echo sounder in order to recognize the “colored” clues.
The thickness of the bottom line is also an excellent clue to hardness. The thick line indicates strong rocks. Thin and light - on a soft bottom, for example, clay.
A hard bottom will return strong signals to the sensor, which may bounce off the surface again. They are shown on the display as a second return signal running parallel under the first bottom line. If the bottom is strewn with stones or pebbles, then its display line will resemble a dotted line with many specks.
Determination of Bottom Structure and Underwater Objects
The main purpose of echo sounders is to view (scan) the underwater space and detect obstacles in front of the ship. There are two methods of such review - sequential and parallel.
Sequential echo sounders are not suitable for identifying underwater objects and are used primarily for navigation purposes. Parallel, or, as it is also called, continuous review provides the opportunity to obtain a large amount of information in real time.
Real-time mode means that the echo sounder does not build a picture on the screen gradually, but transmits it to the screen simultaneously from all rays, updating it several times per second. Therefore, the image is displayed on the screen not in the past, as in echo sounders with a sequential view, but in the present time.
The second advantage of continuous viewing is the large amount of information obtained about underwater objects, which provides a unique opportunity to create echo sounders for recognizing objects, the nature and structure of the bottom, for constructing three-dimensional images, searching and detecting fish. Continuous reception and display of reflected signals allows you to create a sharper and clearer image than with sequential viewing.










